충전 스테이션 설치
충전 스테이션 설치는 크게 두 단계로 구성됩니다. 먼저 충전 스테이션 본체에 고유 ID를 설정한 뒤, 매핑 데이터(PCD)를 기반으로 3D 공간상의 위치와 방향을 등록합니다. 이 정보는 로봇이 자동으로 충전 스테이션에 도킹할 때 사용됩니다.
충전 스테이션 ID 설정
로봇을 충전 스테이션에 물리적으로 연결(충전)한 상태에서 ID를 설정합니다. ID는 각 충전 스테이션을 고유하게 식별하기 위한 값으로, 시스템 전체에서 중복되지 않아야 합니다.
1. 충전 스테이션 ID 획득
충전 스테이션에 현재 설정되어 있는 ID를 조회합니다. 초기 설정값이거나 이전에 소프트웨어에서 설정한 ID가 표시됩니다.
2. 현재 ID 확인
Get ID 버튼을 클릭하면 현재 충전 스테이션에 설정되어 있는 ID를 조회할 수 있습니다. 새로 설치한 충전 스테이션이라면 기본값이 표시되거나 미설정 상태일 수 있습니다.
3. ID 설정
입력 필드에 원하는 ID를 기입한 뒤 Set ID 버튼을 클릭합니다.
4. 설정 성공
ID 설정이 정상적으로 완료되면 성공 메시지가 표시됩니다. Get ID 버튼으로 다시 한번 설정된 ID를 확인하는 것을 권장합니다.
충전 스테이션 위치 정보 설정
매핑 데이터(PCD)를 활용하여 충전 스테이션의 3D 위치와 방향을 등록합니다. 이 정보를 기반으로 로봇이 자동 도킹을 수행하므로, 정확한 위치 지정이 매우 중요합니다.
1. 데이터셋 로딩
툴바의 Open 버튼을 클릭하여 매핑 데이터를 불러옵니다.
2. 팝업 창
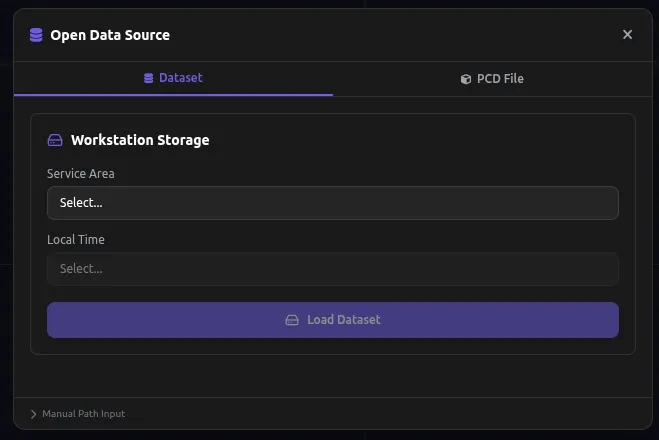
데이터셋을 선택할 수 있는 팝업 창이 표시됩니다.
3. Service Area 및 Local Time 선택
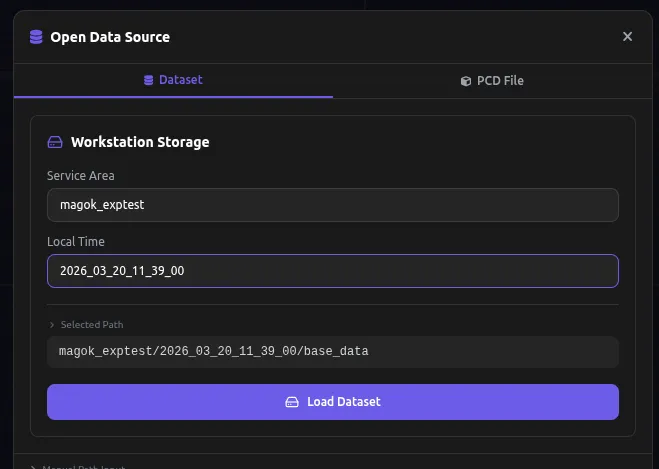
충전 스테이션이 설치된 Service Area와 매핑이 수행된 Local Time을 선택한 뒤 Load Dataset 버튼을 클릭합니다.
4. 데이터셋 로드 완료
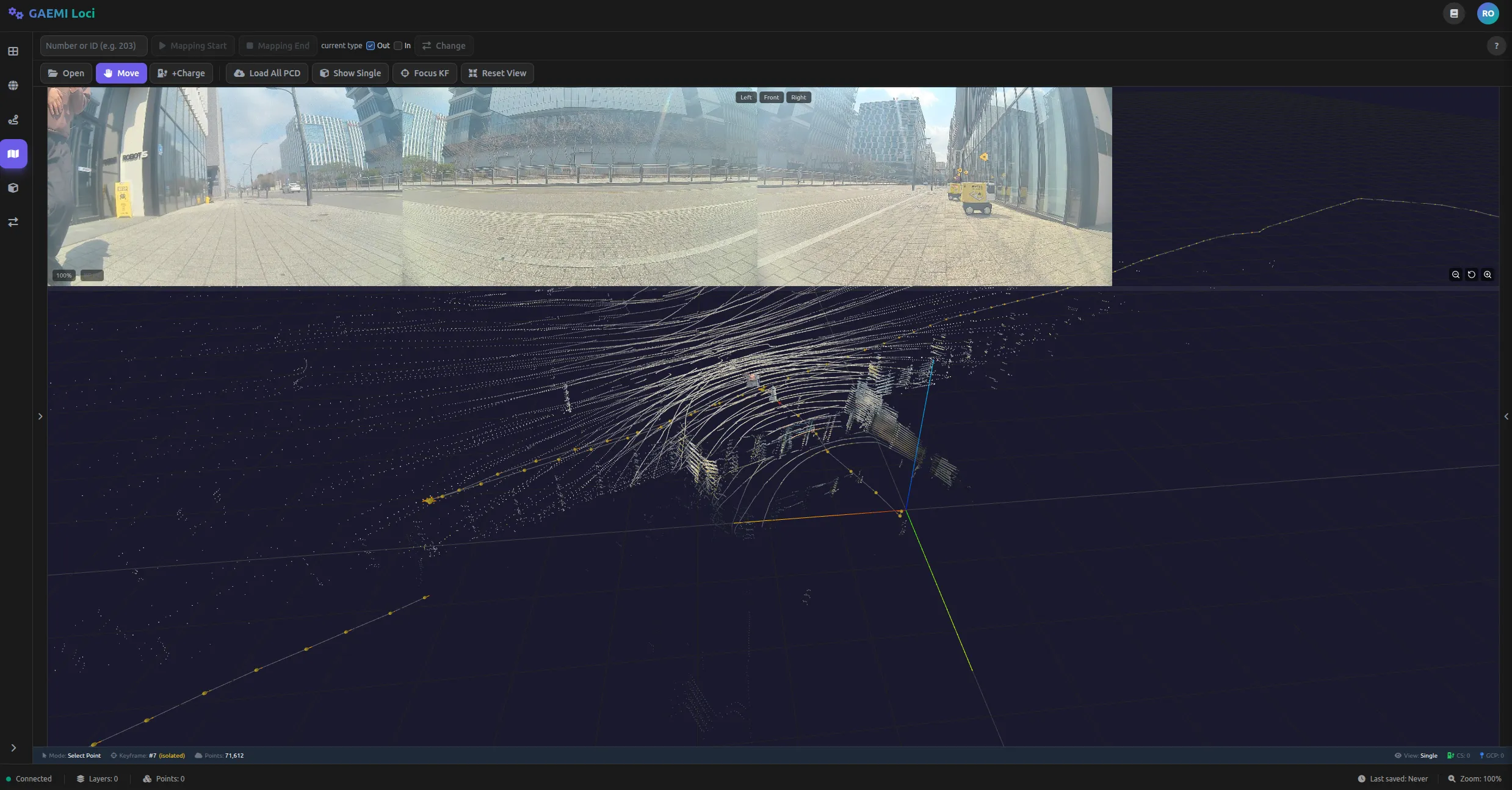
데이터셋이 로드되면 좌측 패널에 키프레임 목록이 표시됩니다. **화살표 키(상/하)**로 키프레임을 순차적으로 이동하며 포인트클라우드를 확인할 수 있습니다.
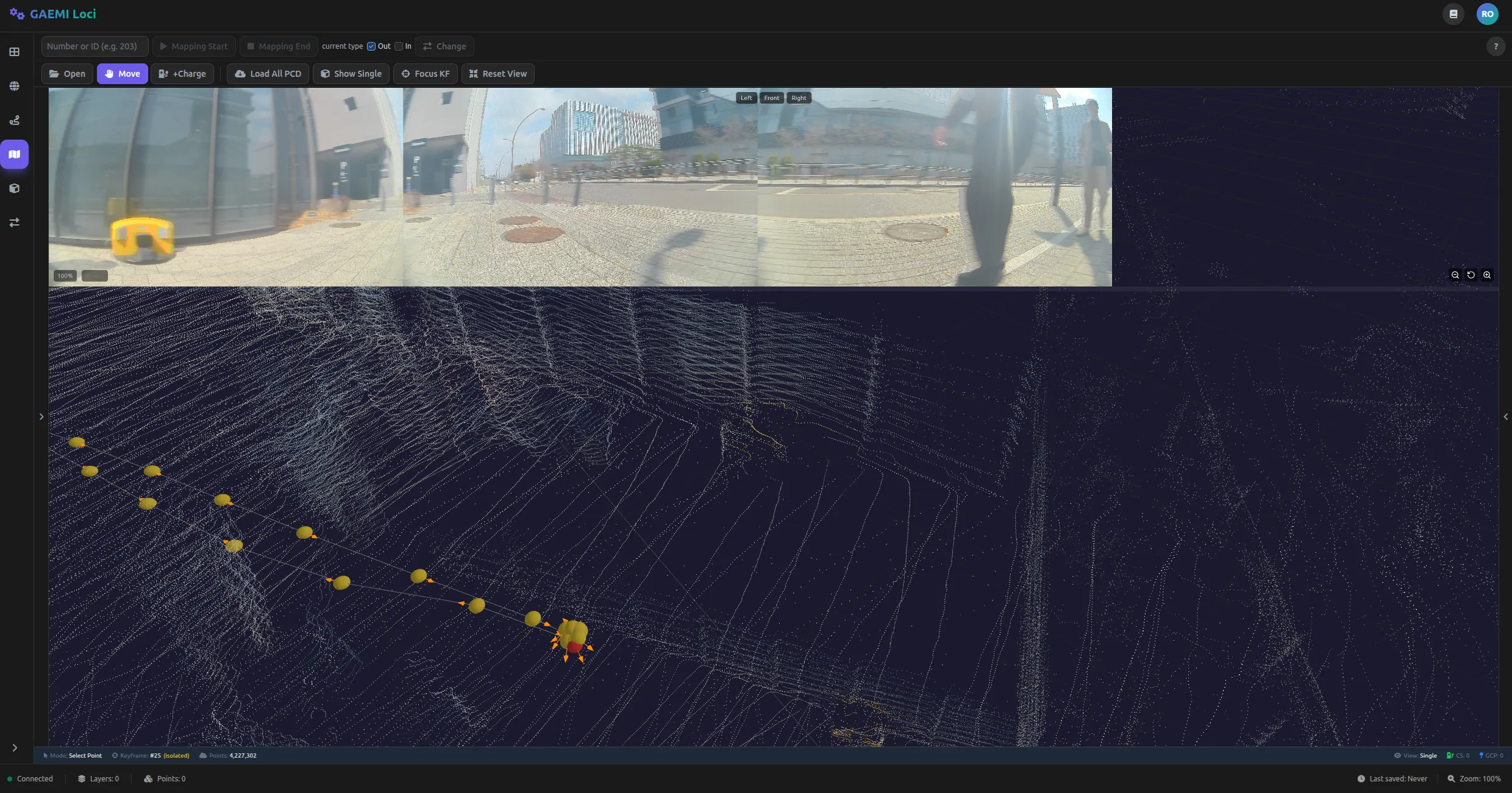
5. 전체 PCD 로딩

개별 키프레임만으로 충전 스테이션을 찾기 어려울 경우, Load All PCD 버튼을 클릭하여 전체 포인트클라우드를 한꺼번에 로드합니다.
6. 로딩 중

전체 PCD를 로딩하는 중입니다. 데이터 크기에 따라 1~2분이 소요될 수 있습니다. 로딩이 완료되면 3D 뷰포트에 전체 포인트클라우드가 표시됩니다.
7. 충전 스테이션 찾기
전체 PCD가 로드된 상태에서 충전 스테이션의 위치를 찾습니다.
| 조작 | 동작 |
|---|---|
| 좌클릭 드래그 | 시점 회전 |
| 마우스 스크롤 | 확대/축소 |
| 우클릭 드래그 | 시점 이동 |
8. +Charge 버튼 클릭
툴바의 +Charge 버튼을 클릭하면 커서가 ’+’ 형태로 변경됩니다. 이 상태에서 3D 뷰포트의 충전 스테이션 위치를 정확히 클릭합니다.
9. 3D 모델 확인

클릭한 위치에 충전 스테이션의 3D 모델이 표시됩니다. 모델의 위치와 방향이 실제 설치 상태와 일치하는지 확인합니다.
10. 미세 조정
충전 스테이션 모델의 위치와 방향을 정밀하게 조정합니다.
| 조정 항목 | 설명 |
|---|---|
| Rotation | 충전 스테이션의 방향(각도)을 조정합니다 |
| Translation | 충전 스테이션의 위치(좌표)를 이동합니다 |
11. Edge 설정
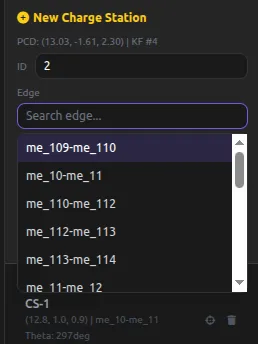
충전 스테이션이 설치된 **Edge(경로 구간)**를 선택합니다. Edge는 로봇이 충전 스테이션에 접근할 때 사용하는 경로 구간을 의미합니다. 올바른 Edge를 지정해야 로봇이 정확한 경로로 도킹에 진입할 수 있습니다.
12. Add 확정
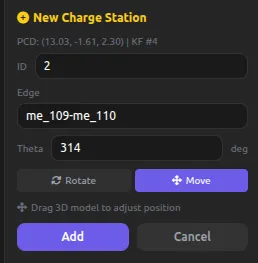
설정한 위치, 방향, Edge 정보를 확인한 뒤 Add 버튼을 클릭하여 충전 스테이션 등록을 확정합니다.
13. Complete Step

현장에 설치된 모든 충전 스테이션의 등록이 완료되면 Complete Step 버튼을 클릭하여 다음 단계로 진행합니다.