루프 클로저 보정
루프 클로저 보정은 SLAM 과정에서 발생하는 **누적 오차(drift)**를 교정하는 기능입니다. 3D 맵 에디터의 Correction 탭에서 수행합니다.
화면 구성
- 좌측 패널: 맵 로드/저장(MapControls), 루프 클로저 패널(LoopClosurePanel), 지오레퍼런스 패널
- 중앙: 3D 뷰포트 (포인트클라우드 + 포즈 그래프)
키프레임 색상 코드
3D 뷰포트에서 키프레임은 색상으로 구분됩니다:
| 색상 | 의미 |
|---|---|
| 빨간색 | 타겟 맵 키프레임 (기존 맵) |
| 초록색 | 소스 맵 키프레임 (병합할 맵) |
| 시안(cyan) | 고정된 키프레임 (Prior Factor 적용) |
작업 순서
타겟/소스 키프레임 선택부터 기즈모 조정, ICP 정렬, 최적화까지의 전체 흐름입니다.
-
3D 뷰어에서 기준이 되는 키프레임을
Ctrl + 우클릭→ Set as Target (Red) 클릭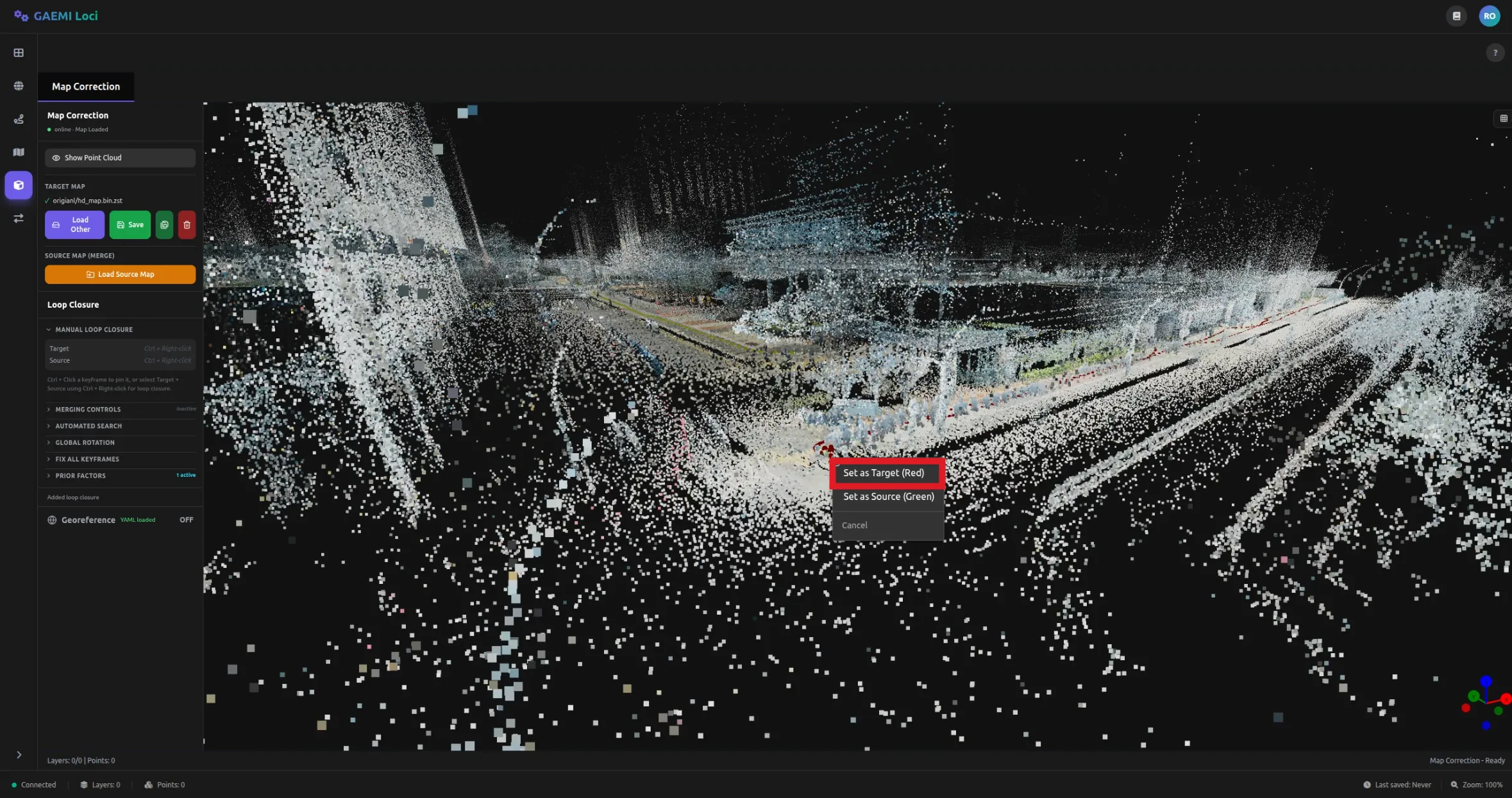
-
보정해야 할 다른 키프레임을
Ctrl + 우클릭→ Set as Source (Green) 클릭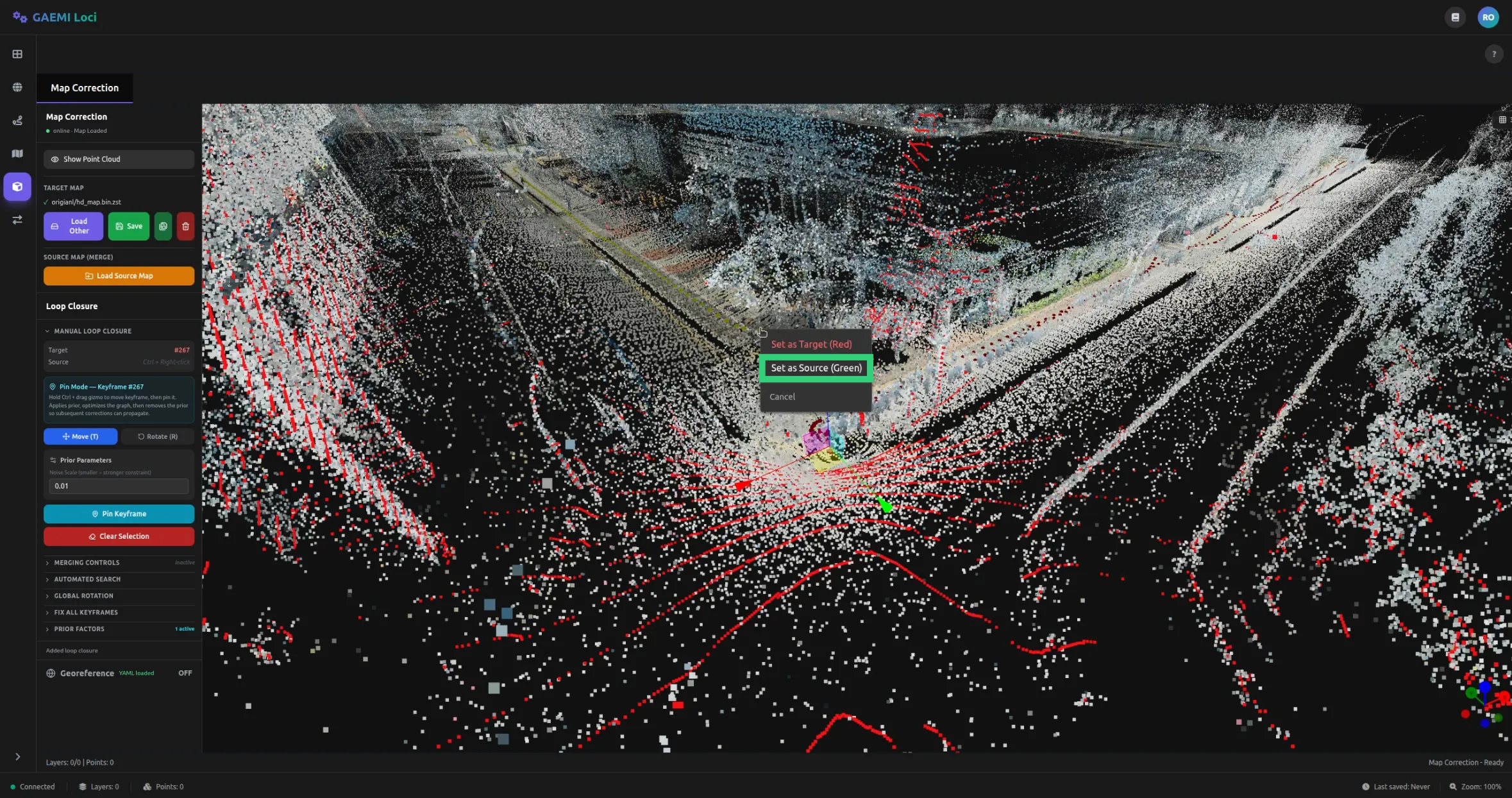
-
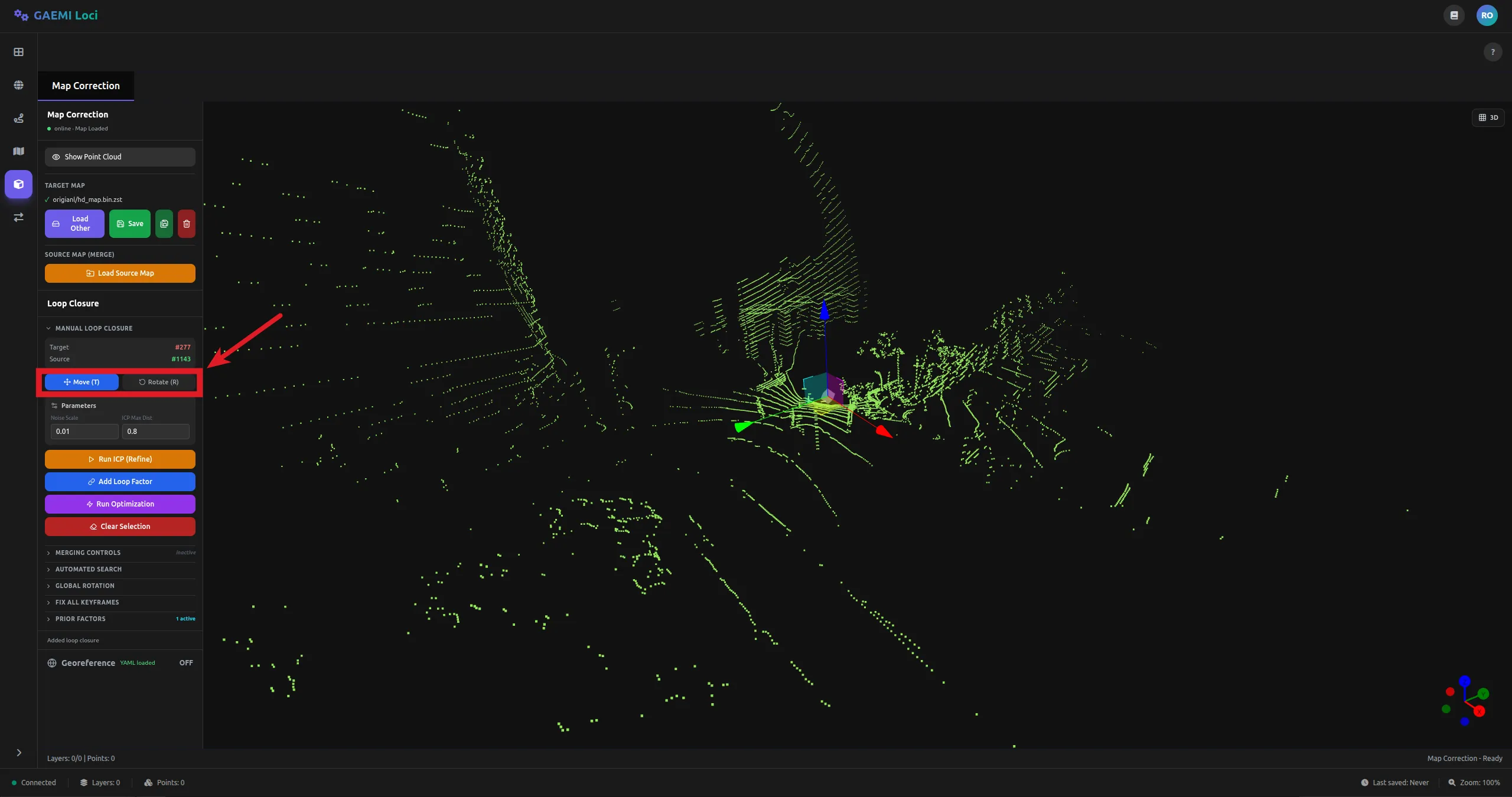
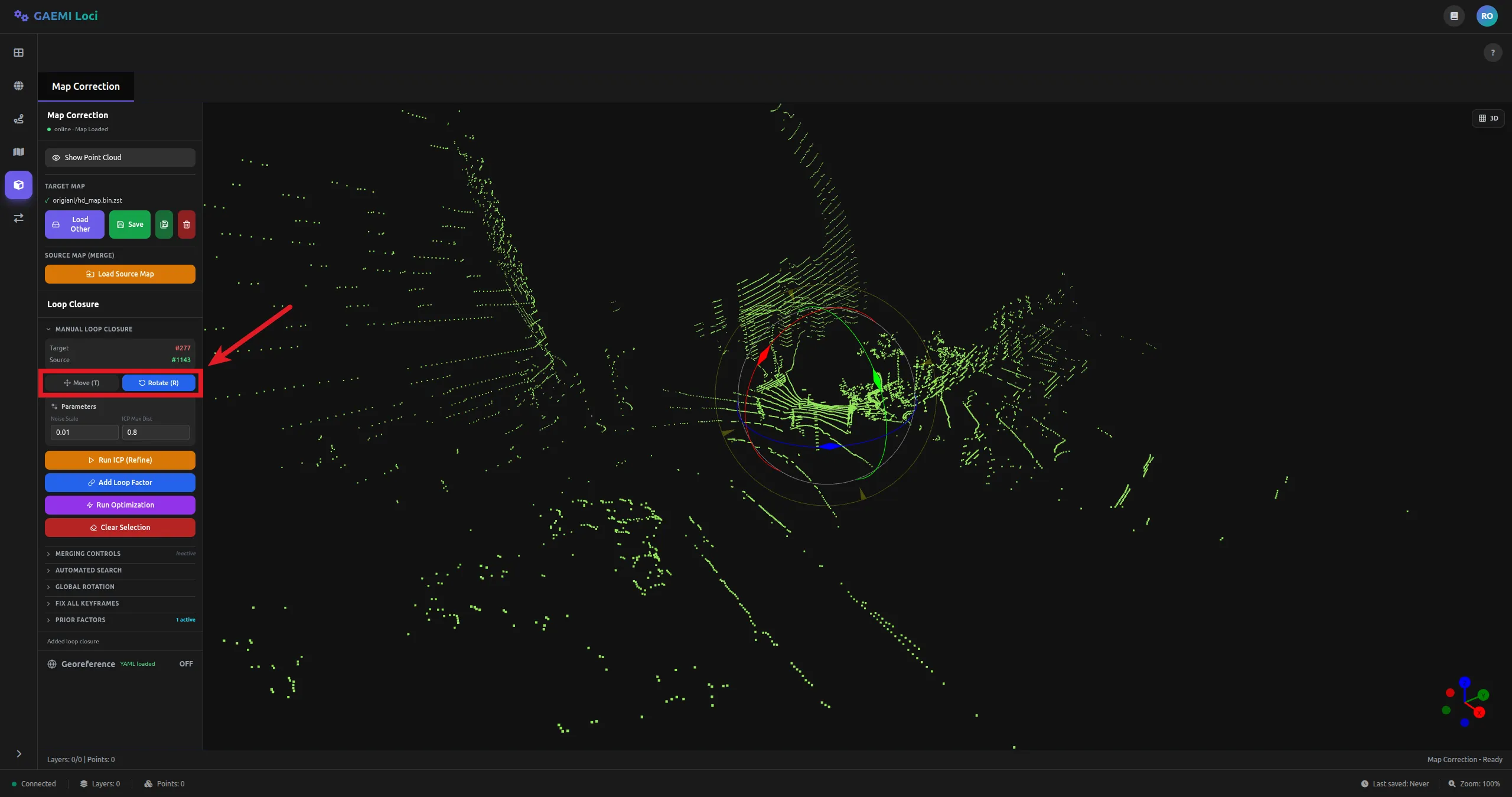
T/R키로 기즈모 모드를 전환하고,Ctrl을 누른 채 기즈모를 드래그하여 위치·방향 수동 조정T: Translate (이동) /R: Rotate (회전)
-
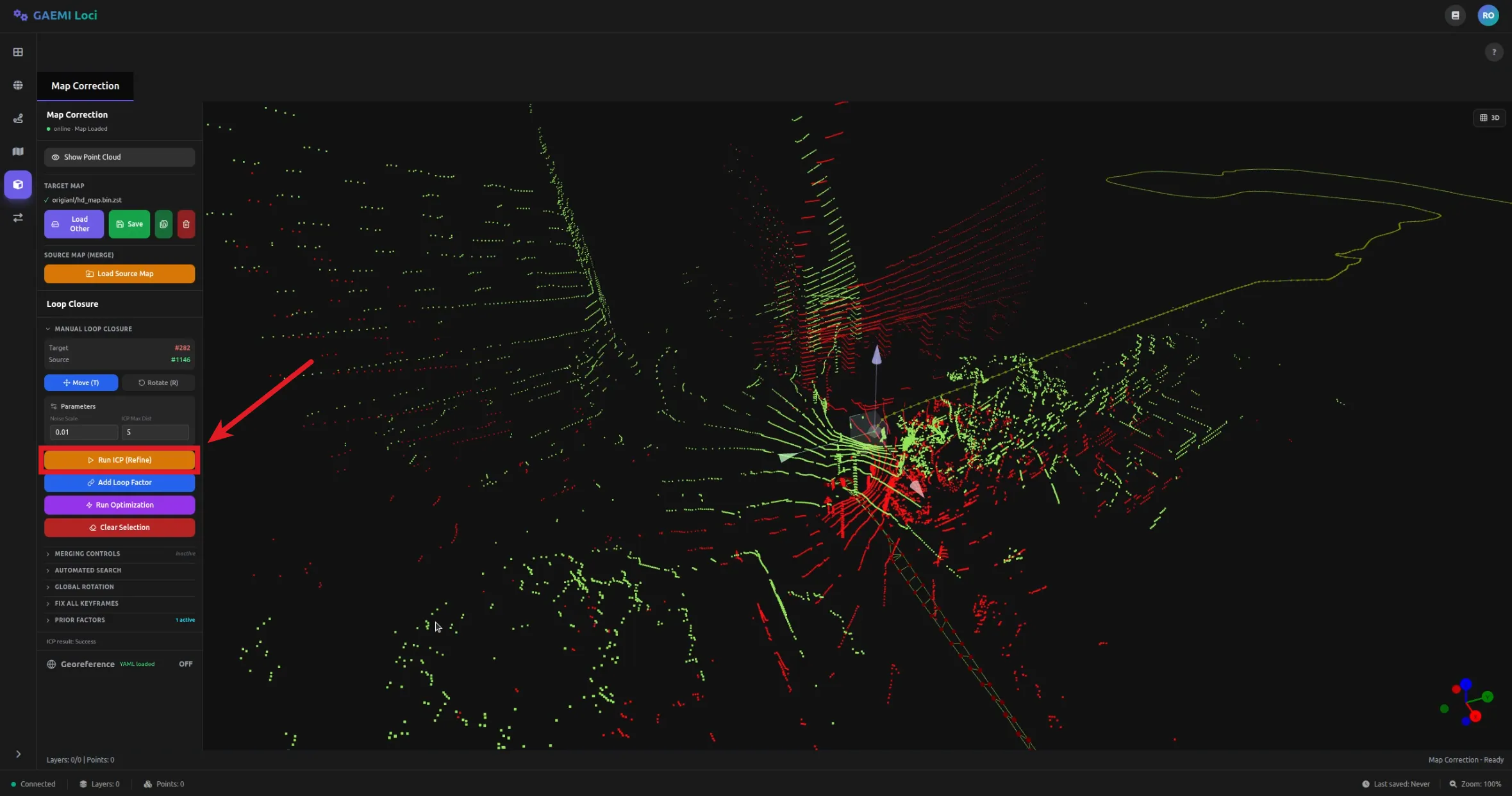
Run ICP로 정밀 정렬
- Noise Scale: Between Factor의 노이즈 값 (기본값: 0.01, 범위: 0 ~ 1)
- Max Distance: 대응점 최대 거리 (기본값: 5.0m, 범위: 0 ~ 10)
-
Add Loop Factor 버튼 클릭 (기준 키프레임과 보정할 키프레임을 연결)
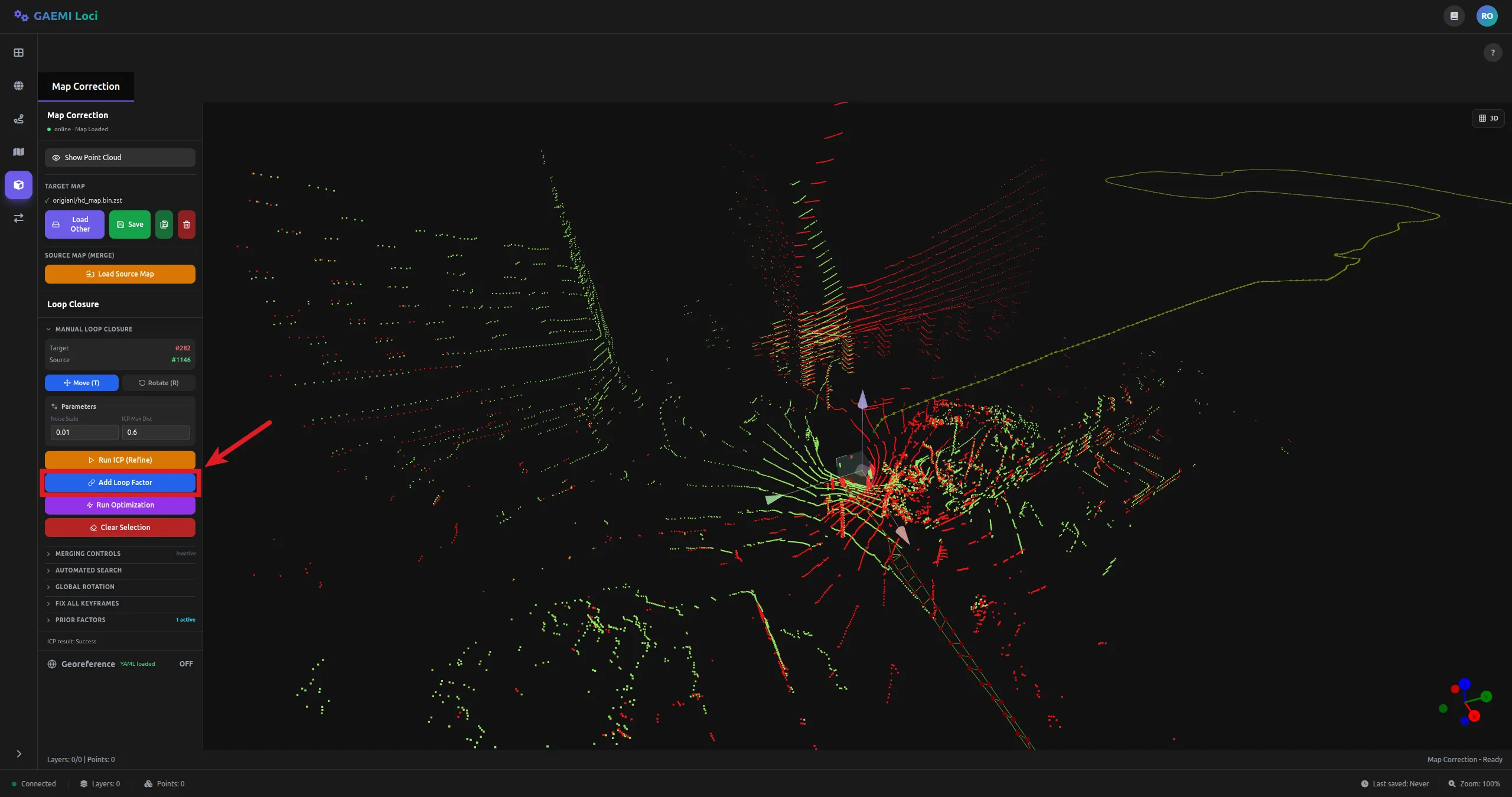
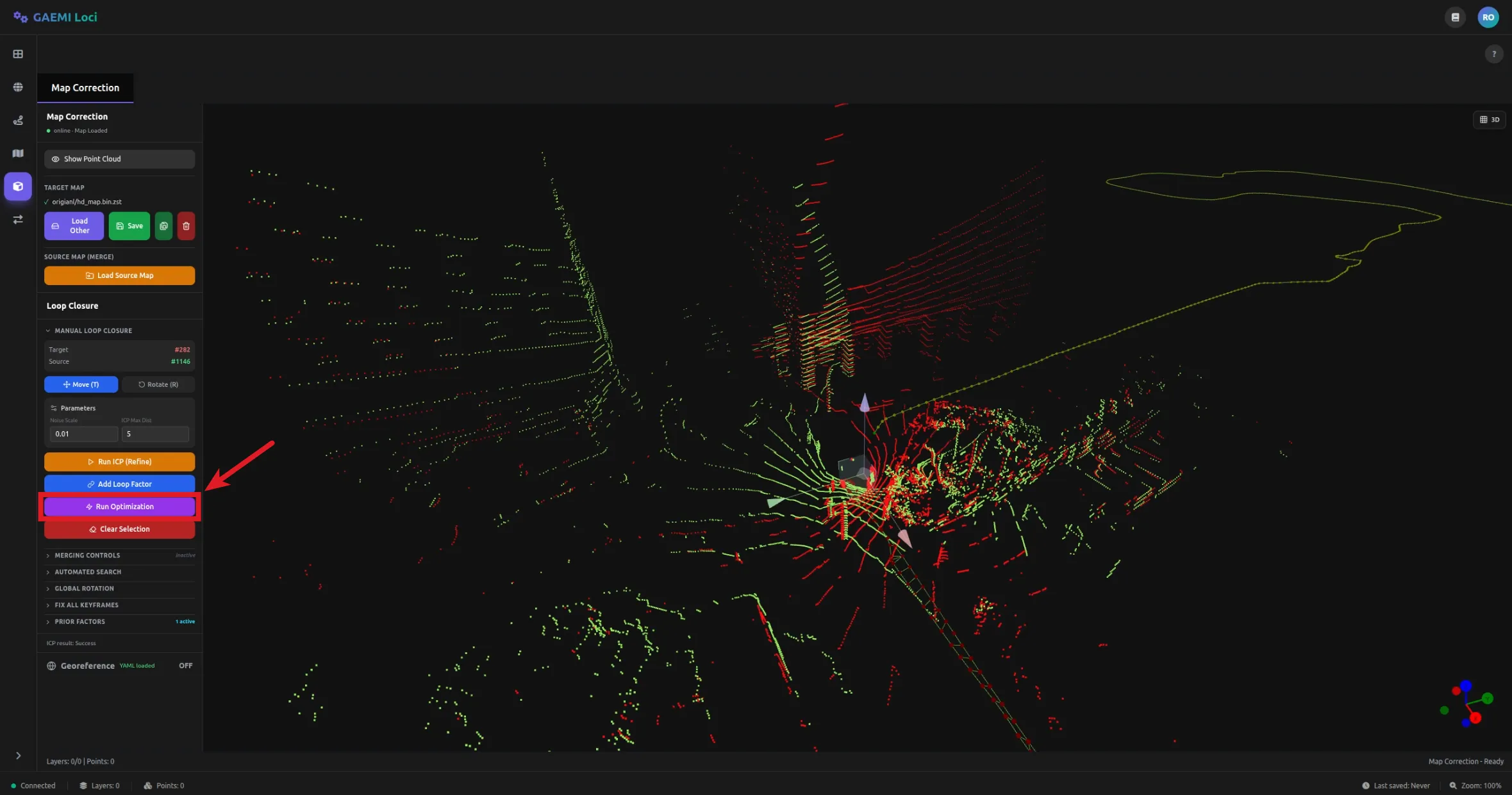
-
Run Optimization 버튼으로 맵 최적화
실제 사용 흐름
[수동 루프 클로저 워크플로우]1. 기준 키프레임을 Ctrl + 우클릭 → Set as Target (Red)2. 보정할 키프레임을 Ctrl + 우클릭 → Set as Source (Green)3. T / R 키로 기즈모 모드 전환, Ctrl + 드래그로 위치·방향 조정4. [Run ICP] → 정밀 정렬5. [Add Loop Factor] → 기준·보정 키프레임 연결6. [Run Optimization] → 맵 최적화7. 결과 확인 후 [Save] → 저장맵 저장
보정된 맵은 Boost 직렬화 + Zstandard 압축 형식(.bin.zst)으로 저장됩니다.
좌측 패널 MapControls에서:
- Save: 현재 경로에 즉시 저장
- Save As: 다른 경로로 저장