지오레퍼런싱
지오레퍼런싱은 SLAM으로 생성된 로컬 좌표계 맵을 실제 GPS 좌표계에 정렬하는 과정입니다. 3D 맵 에디터의 Georeference 탭에서 수행합니다.
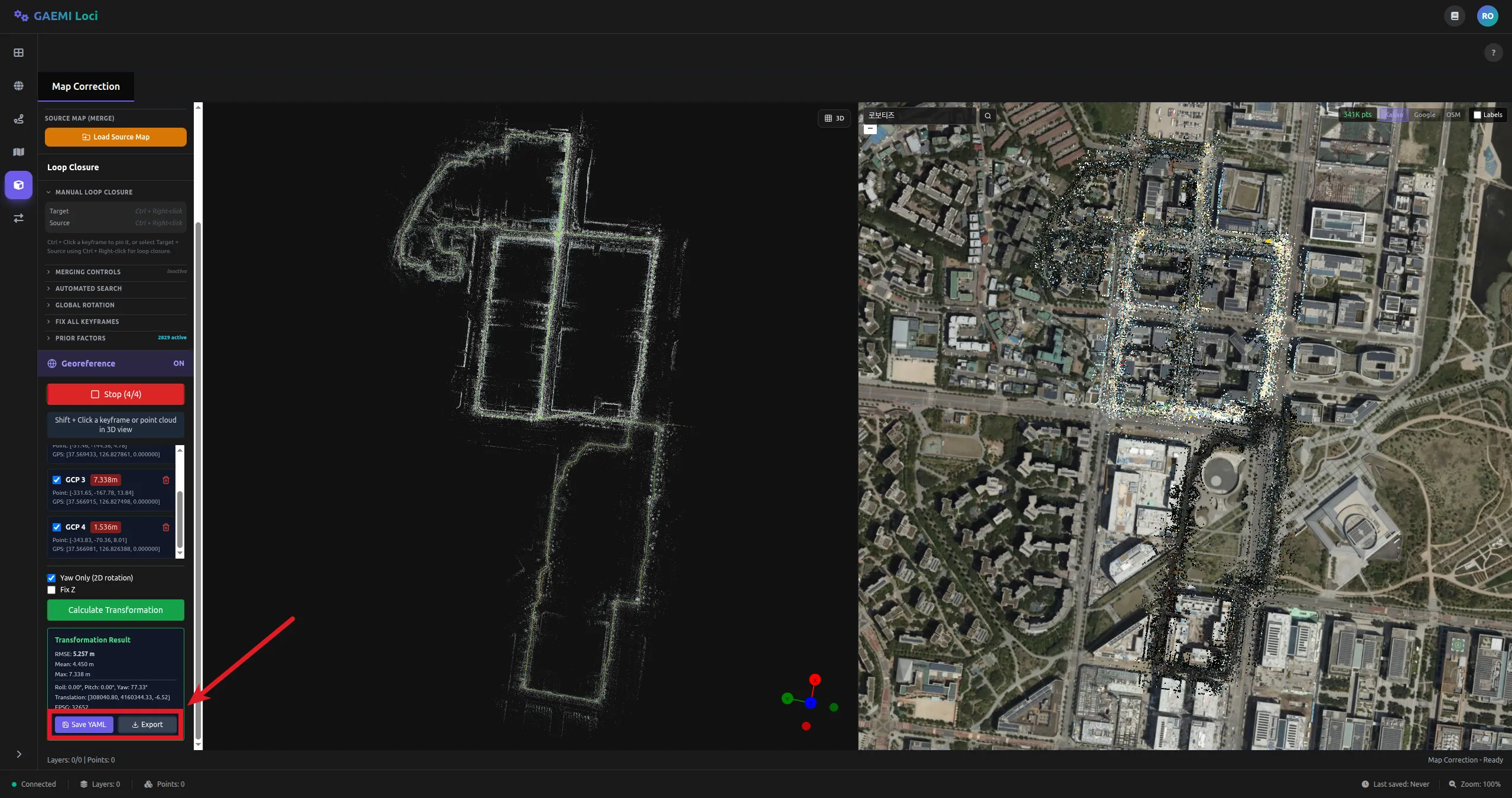
화면 구성
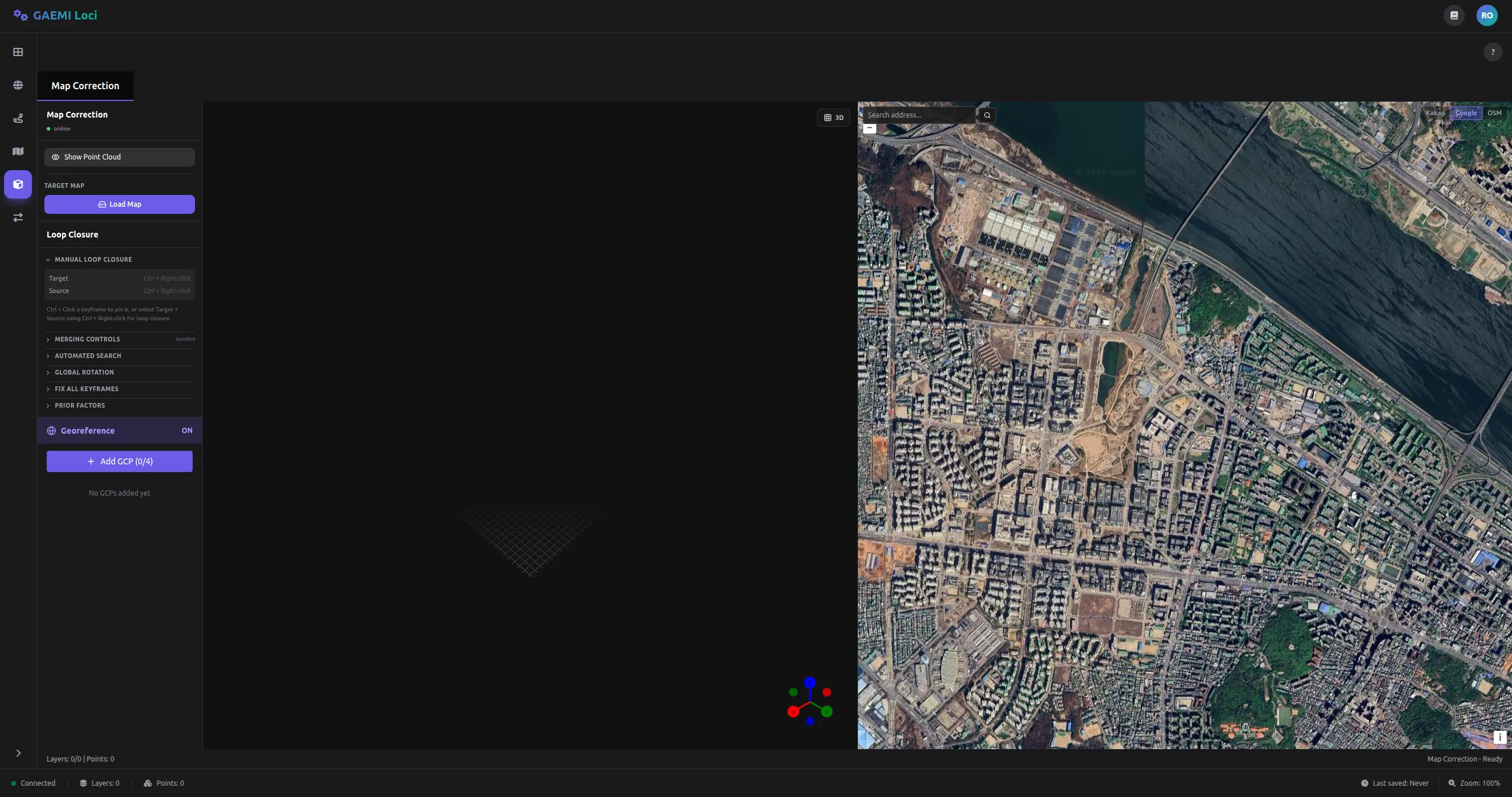
- 좌측: 3D 포인트클라우드 뷰포트 + 좌측 패널(GeoreferencePanel)
- 우측: 위성 지도 — 지오레퍼런스 모드 활성화 시 분할 표시
작업 순서
GCP 추가부터 변환 계산까지의 전체 흐름입니다.
-
Add GCP 버튼을 클릭하여 GCP 추가 모드 진입
- 버튼에 현재 GCP 수가 표시됩니다:
Add GCP (0/4) - 모드가 활성화되면 버튼이 Stop (0/4) 으로 변경됩니다


- 버튼에 현재 GCP 수가 표시됩니다:
-
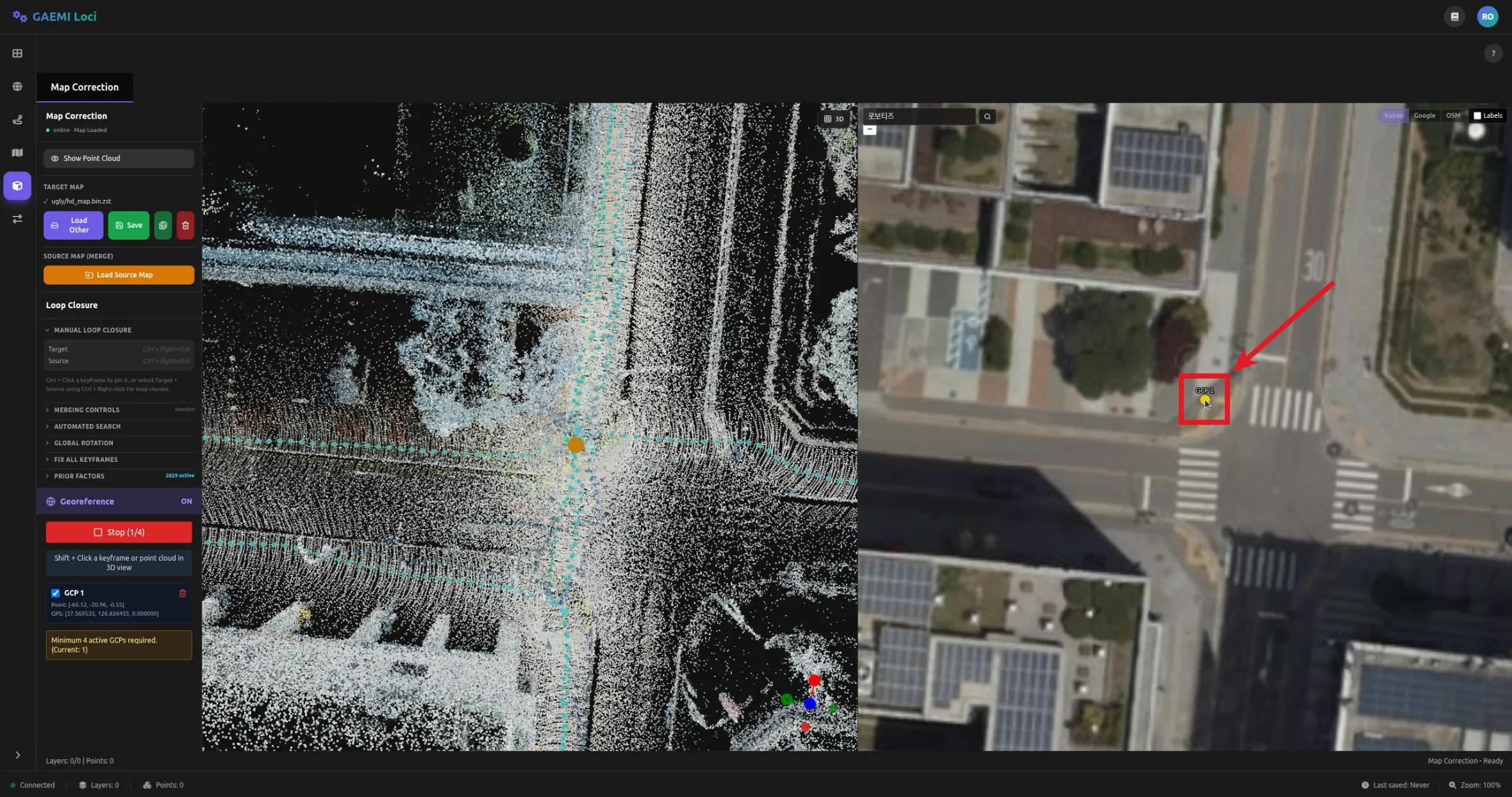
3D 뷰포트에서 Shift + 좌클릭으로 포인트클라우드의 기준점을 선택
- 클릭한 포인트의 X, Y, Z 좌표가 자동으로 입력됩니다
- 건물 모서리, 도로 경계, 특징적인 구조물 등 명확히 식별 가능한 지점을 선택하세요

-
우측 위성 지도에서 Shift + 좌클릭으로 동일한 지점을 선택
- 클릭한 위치의 위도(Lat), 경도(Lon) 좌표가 자동으로 입력됩니다
- GCP가 확정되고 목록에 추가됩니다
-
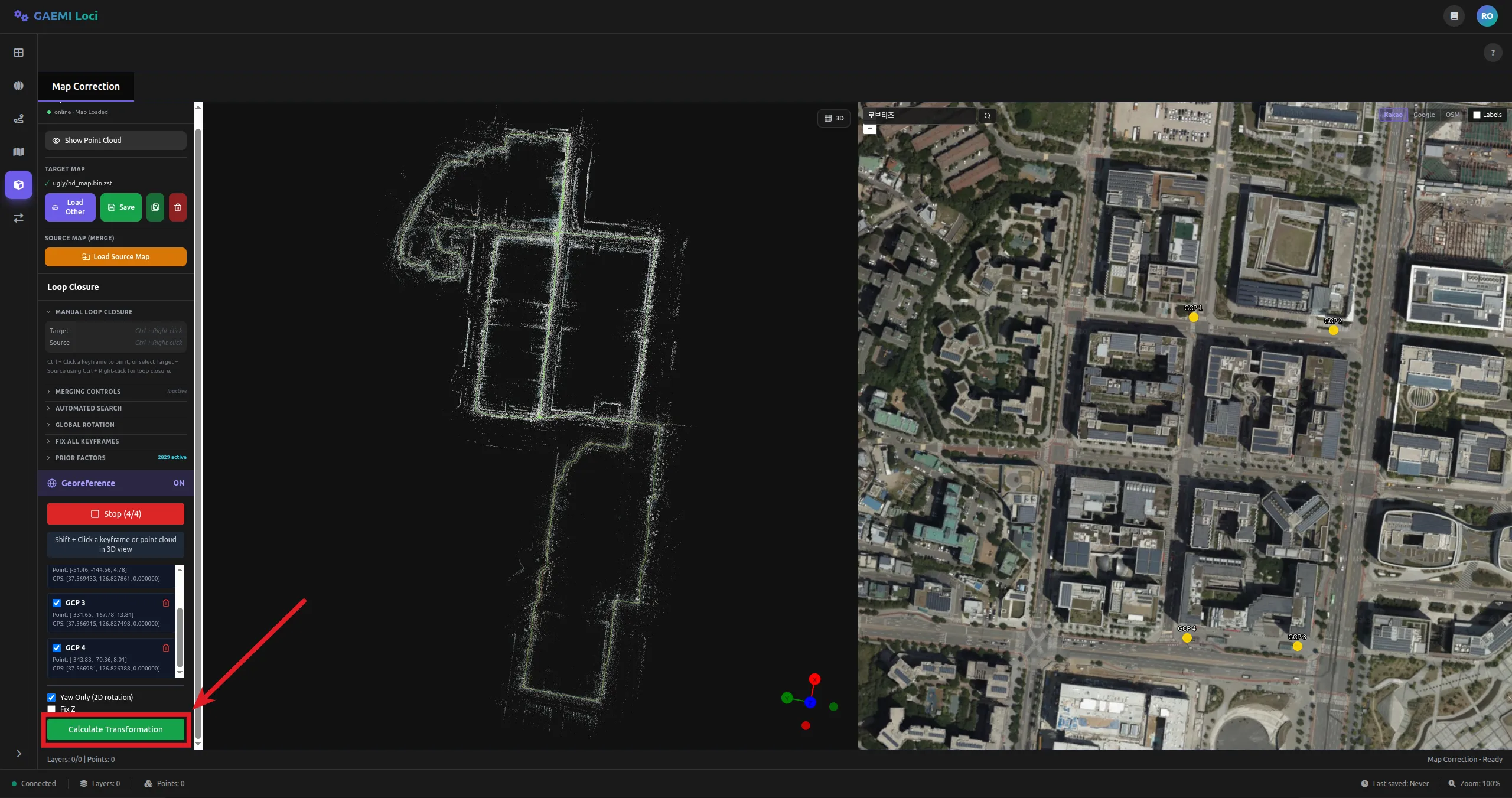
1~3단계를 반복하여 최소 4개 이상의 GCP를 추가
-
Calculate Transformation 버튼을 클릭하여 변환 계산 실행
- 변환 옵션: Yaw Only (2D rotation) — 회전을 수평 방향으로만 제한 / Fix Z — 높이 이동 고정
- 계산 중 버튼이 Calculating… 으로 변경됩니다
-
결과를 확인하고 Save YAML 또는 Export 버튼으로 저장
Pin Keyframe
GCP 지오레퍼런싱을 통해 맵 전체를 GPS 좌표계에 정렬한 후에도, SLAM 맵 자체의 구조적 오차로 인해 특정 구간이 위성 지도와 맞지 않는 경우가 발생할 수 있습니다. Pin Keyframe은 이러한 국소적 불일치를 키프레임 단위로 보정하는 기능입니다.
위성 지도를 참조하면서 어긋난 키프레임을 올바른 위치로 이동시키면, 내부적으로 다음 3단계가 자동으로 수행됩니다:
- 이동한 위치에 Prior Factor 추가
- 그래프 최적화 실행 — 보정 효과가 주변 키프레임으로 전파
- Prior Factor 자동 제거 — 이후 추가 보정 시 과도한 제약 방지
이를 통해 해당 지점의 보정이 인접 영역으로 자연스럽게 전파되면서도, 이후 다른 위치를 보정할 때 기존 핀이 제약 조건으로 남지 않습니다.
사용 방법
위성 지도에서 맵이 어긋난 구간을 확인한 뒤, 3D 뷰포트에서 Ctrl + 좌클릭으로 해당 키프레임을 선택하여 올바른 위치로 이동합니다. 맵 전체가 아닌 부분적으로 틀어진 영역을 세밀하게 교정할 때 유용합니다.
실제 사용 흐름
[지오레퍼런싱 워크플로우]1. [Add GCP] → GCP 추가 모드 진입2. 3D 뷰포트에서 Shift + 좌클릭 → 포인트클라우드 기준점 선택3. 위성 지도에서 Shift + 좌클릭 → 동일 지점 GPS 좌표 선택4. 1~3 반복하여 GCP 4개 이상 추가5. [Calculate Transformation] → 변환 계산6. 결과 확인 후 [Save YAML] 또는 [Export] → 저장7. 위성 지도와 어긋난 구간 확인 → Ctrl + 좌클릭으로 키프레임 보정 (Pin Keyframe)8. 필요한 구간마다 7 반복변환 결과 저장
| 버튼 | 기능 |
|---|---|
| Save YAML | 서비스 구역 루트 및 hd_map/georeferenced/ 디렉토리에 YAML 저장 |
| Export | YAML 파일을 로컬 PC로 다운로드 |
저장된 YAML(map_meta_data.yaml)에는 EPSG 코드, Yaw, Translation 정보가 포함됩니다. 다음 번 맵 로드 시 자동으로 읽어옵니다.