GAEMI Loci 소개
GAEMI Loci란?
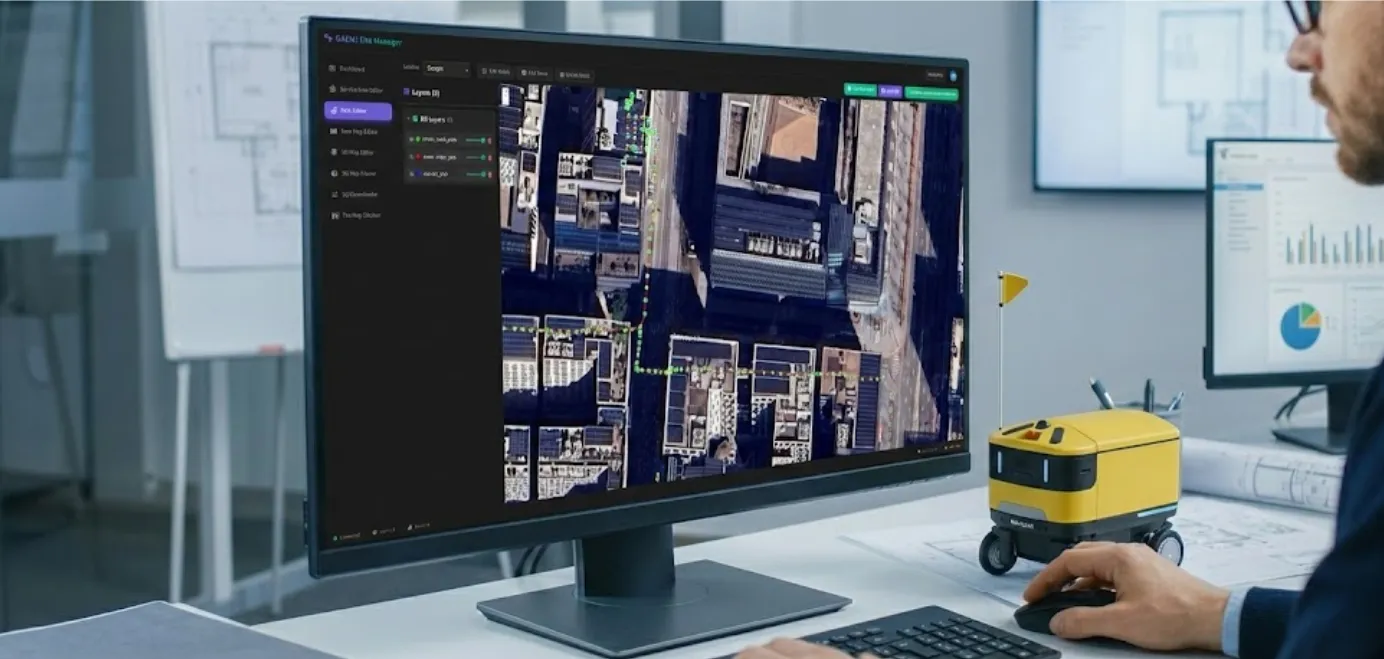
자율 이동 로봇이 실외에서 안전하게 주행하려면 정밀한 HD(High-Definition) 맵이 필요합니다. GAEMI Loci는 현장에서 로봇으로 수집한 데이터를 HD 맵으로 만들고, 편집하고, 로봇에 배포하는 웹 플랫폼입니다.
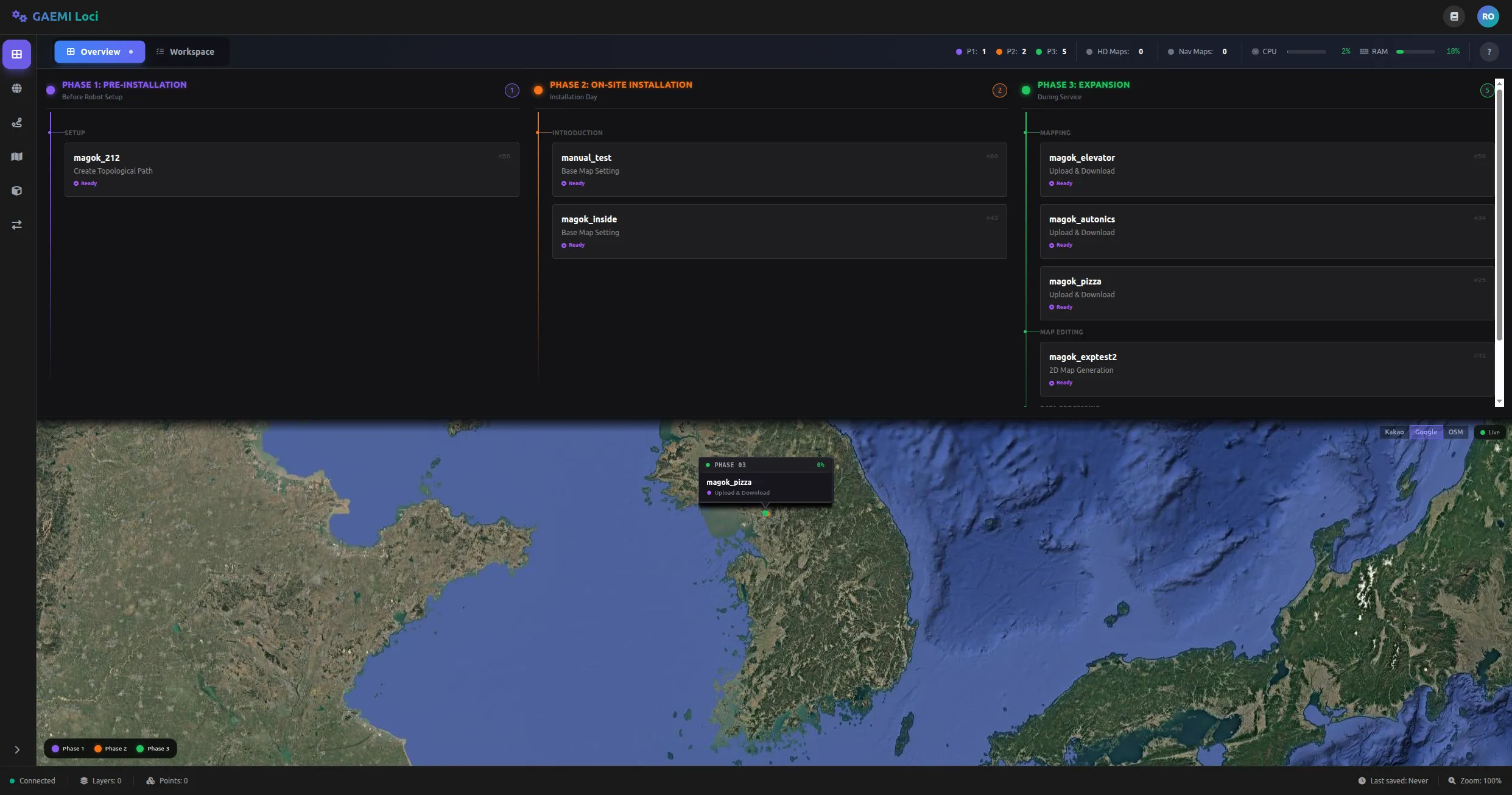
GAEMI Loci는 HD 맵 생성을 **3개 Phase(단계)**로 나누어 관리합니다. 각 Phase는 세부 Step으로 구성되어 있으며, 대시보드에서 현재 진행 상태를 확인할 수 있습니다.

Phase 1 — 사전 준비
로봇을 현장에 설치하기 전에, 사무실에서 미리 준비하는 단계입니다.
- 서비스 구역 정의: 위성 지도에서 로봇이 운행할 구역을 지정합니다.
- 로봇 경로 작성: 구역 내에서 로봇이 따라갈 주행 경로를 편집합니다.
- 경로 검토 및 승인: 작성된 경로를 검수자가 확인하고 승인합니다.
Phase 2 — 현장 설치

로봇을 현장에 배치하고 실제 매핑 데이터를 수집하여 HD 맵을 만드는 단계입니다.
- 매핑 데이터 수집: 현장에서 로봇을 운행하여 주변 환경 데이터를 수집합니다.
- 데이터 업로드: 수집된 데이터가 서버에 업로드됩니다.
- HD 맵 자동 생성: 서버가 업로드된 데이터를 분석하여 자동으로 HD 맵을 생성합니다.
- 맵 편집 및 보정: 생성된 맵을 웹에서 확인하고, 필요한 부분을 수정하거나 보정합니다.
- 최종 업로드: 완성된 맵을 로봇에 배포할 수 있는 형태로 업로드합니다.
Phase 3 — 지역 확장
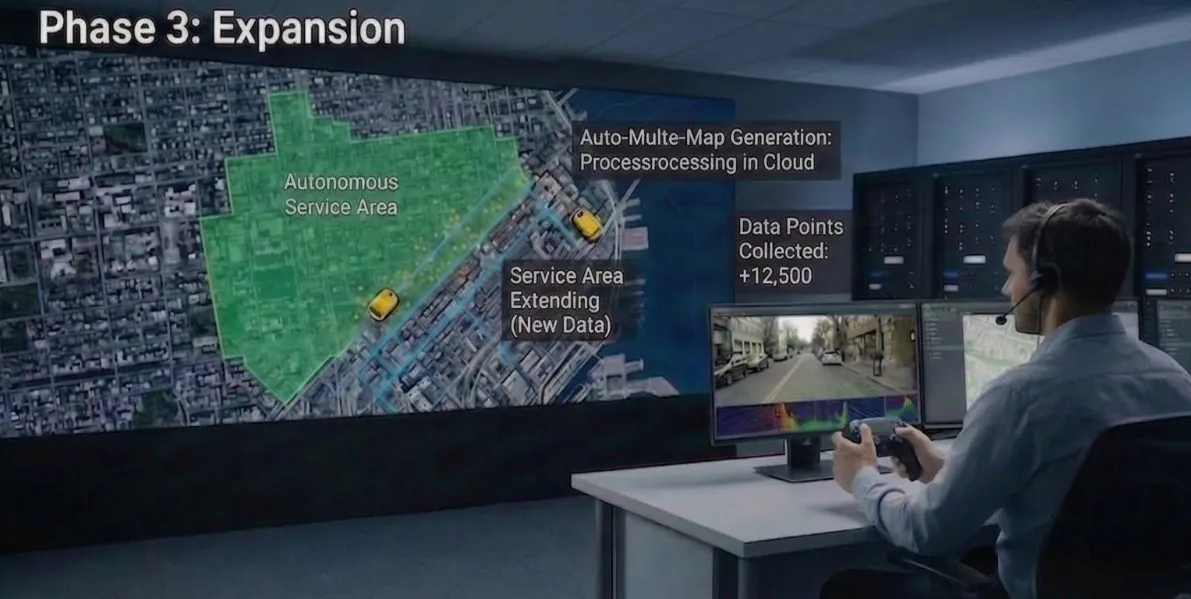
서비스 구역을 넓히거나, 기존 맵을 개선하는 단계입니다. 필요에 따라 반복할 수 있습니다.
- 추가 구역 매핑: 새로운 구역에서 추가 데이터를 수집합니다.
- 기존 맵과 병합: 새로 수집한 데이터를 기존 HD 맵에 합칩니다.
- 반복 개선: 세션 단위로 데이터를 추가하며 맵 품질을 지속적으로 높입니다.
맵 생성 과정 요약
전체 과정을 간단히 정리하면 다음과 같습니다.
- 현장에서 데이터 수집 — 로봇이 주행하며 주변 환경을 스캔합니다.
- 서버에 자동 업로드 — 수집된 데이터가 클라우드 서버로 전송됩니다.
- HD 맵 자동 생성 — 서버가 데이터를 처리하여 HD 맵을 만듭니다. 진행률을 실시간으로 확인할 수 있습니다.
- 웹에서 맵 편집 — 생성된 맵을 브라우저에서 확인하고, 장애물 수정, 경로 보정 등을 수행합니다.
- 로봇에 배포 — 완성된 맵을 로봇에 전달하여 자율 주행에 활용합니다.